小米足式机器人专利曝光:前后双弹簧设计
近日,北京小米移动软件有限公司“足式机器人的小腿结构和足式机器人”专利获授权。
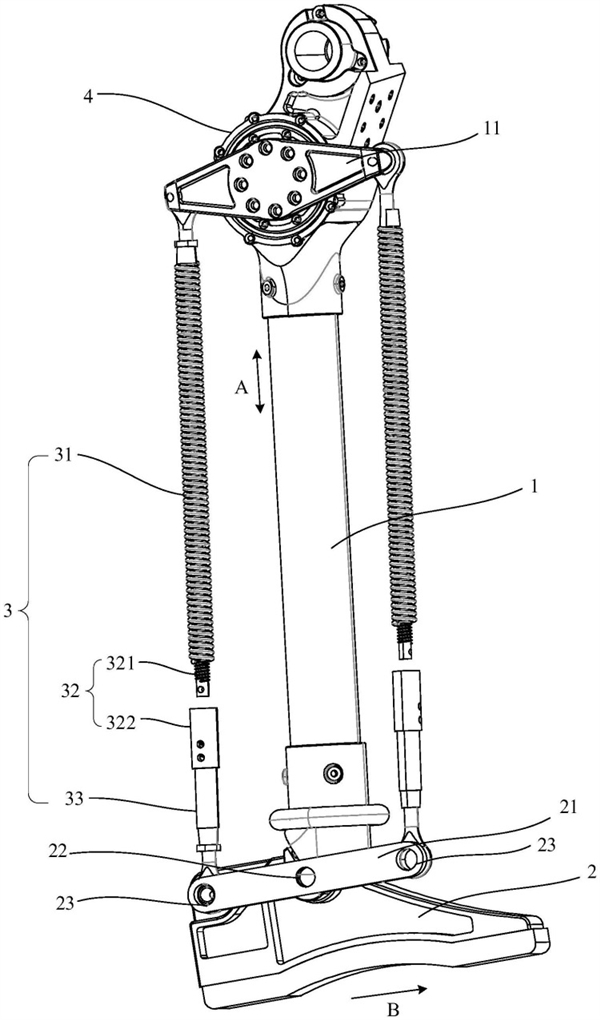
企查查专利摘要显示,该专利属于足式机器人技术领域,该足式机器人的小腿结构包括:腿部杆、足部和弹性连接机构,所述腿部杆的第一端与所述足部的第一位置可枢转地相连,所述弹性连接机构位于所述腿部杆的侧方,所述弹性连接机构与所述腿部杆的第二端相连,且与所述足部的第二位置相连。
通过在腿部杆的侧方设置弹性连接机构,弹性连接机构与腿部杆相连,且与足部相连,在足式机器人运动的过程中,弹性连接机构可以有效地吸收足部处产生的震动,提高机器人运动的稳定性,并减小震动对机器人造成的冲击,避免震动对机器人造成损坏。
去年8月,小米就曾发布了首款人形机器人“铁大(CyberOne)”,身高177厘米,体重52公斤,是一款全尺寸人形仿生机器人。官方表示,铁大背后的智能、机械能力,全部由小米机器人实验室全栈自研完成,相比之前的机械狗,它的研发难度更高。
官方同时表示铁大具有高情商、可感知人类情绪,视觉敏税、可对真实世界三维虛拟重建,“小脑”发达、可实现双足运动姿态平衡,四肢强健、动力峰值扭矩300Nm等领先能力。

相关文章
- 大疆7.5万元电影机Ronin 4D直接满血:支持徕卡、松下等L卡口镜头
- 1799 元,小米米家智能零冷水燃气热水器 16L S1 今日开启众筹
- 299元!小米对讲机2S发布:市区5公里通话 100个对讲频道
- 小米米家智能零冷水燃气热水器 16L S1 将于 2 月 8 日开启众筹,众筹价 1799 元
- 索尼发布两款智能中心构图摄像机:支持人工智能分析功能,可自动识别拍摄
- 一年卖出超26万台!石头科技G10S成2022全网累计销量第一
- 华为打造医药行业首个数字机器人平台:效率最高提升25倍
- 负离子吹风机到底是不是智商税?一文读懂
- 2023 ISE展会,三星展示商用显示可持续发展新时代
- 我国移动物联网连接数占全球 70%,“物”连接快速超过“人”连接
- Bose 家庭娱乐扬声器 550 发布:售价 4999 元,支持 TrueSpace 增强原音技术、杜比全景声内容
- 绿米 Aqara 发布可视门铃 G4 / 智能门锁 U100:支持 HomeKit 安全视频和 Home Key
- 飞利浦首次为三星电视带来灯光同步,并推出新的泛光灯灯泡
- LG 新一代 OLED 电视即将发布:G3 系列亮度提升 70%,支持 HDMI 2.1 QMS
- 12款华为智慧屏喜提版本升级:支持iOS投屏、畅连通话
- 纯钛杯身!小米米家保温杯Ti首批卖光了:30小时众筹金额破50万元